Real-time path planning and control of an unmanned ground vehicle with dynamic obstacles Zhixiang Liu 1:55 6 years ago 95 Далее Скачать
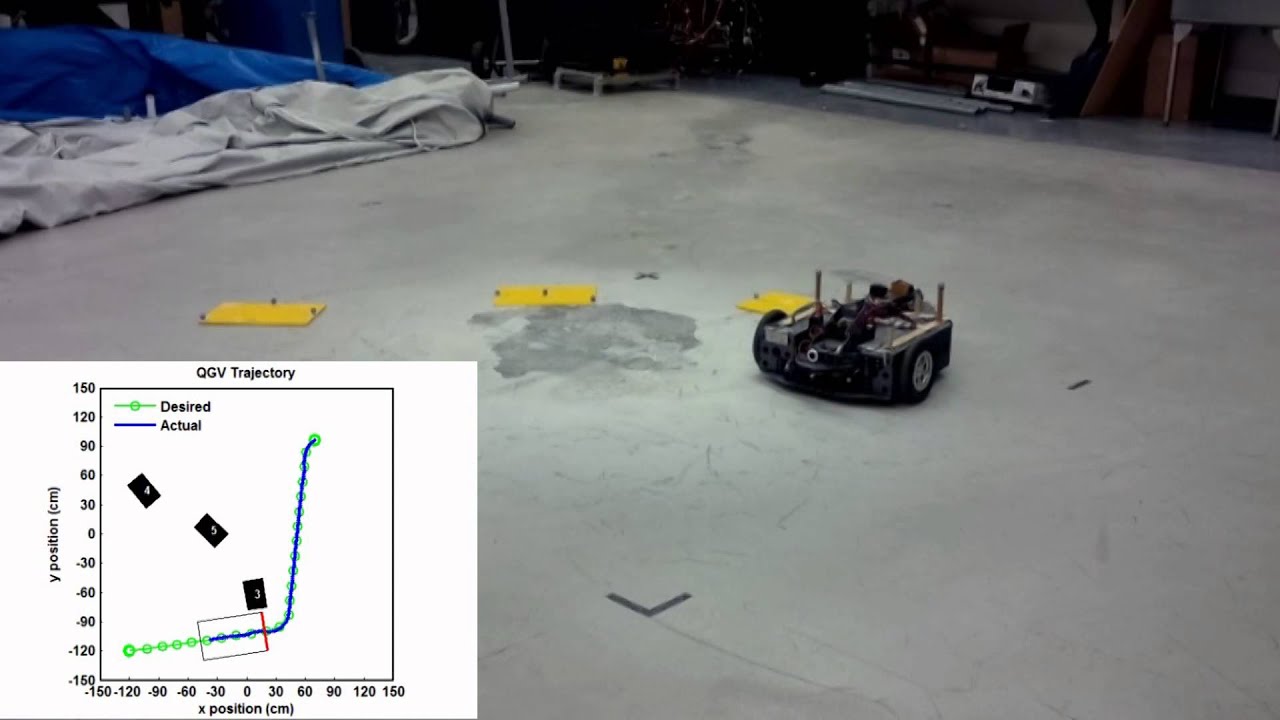
UGV Path Planning and Dynamic Obstacles Avoidance Test Video NAV Laboratory, Concordia University, Canada 2:13 9 years ago 494 Далее Скачать
Real-time-path-planning with dynamic obstacle avoidance Rishabh Biyani 1:15 7 years ago 5 563 Далее Скачать
Realtime Path Planning in Dynamic Environments ROS-I Consortium 14:38 3 years ago 1 918 Далее Скачать
ROBIO2019-Dynamic Obstacle Avoidance for UAVs Using a Fast Trajectory Planning Approach Arc Lab 1:26 4 years ago 246 Далее Скачать
Obstacle Avoidance for Unmanned Ground Vehicle-Simulation Results Volkan Sezer 0:25 12 years ago 1 172 Далее Скачать
UGV Path Planning and Obstacle (Static) Avoidance Test Video NAV Laboratory, Concordia University, Canada 1:34 9 years ago 156 Далее Скачать
Autonomous Indoor Navigation for an UGV: Replanning due to Dynamic Obstacle Samuel Nyffenegger 0:11 5 years ago 75 Далее Скачать
High-Tech Control of Unmanned Ground Vehicles Michigan Engineering 3:12 11 years ago 1 848 Далее Скачать
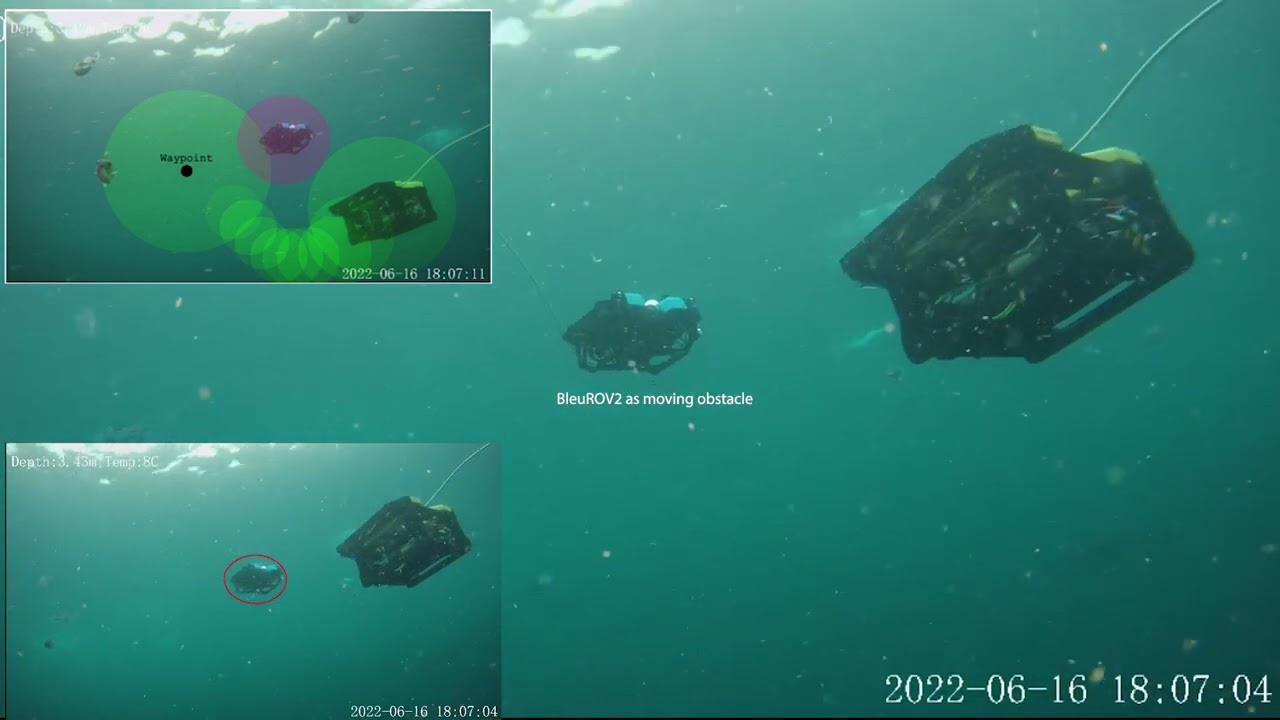
3D obstacle avoidance and path planning for unmanned underwater vehicles using elastic bands SINTEF Ocean 2:07 9 months ago 713 Далее Скачать
Path Planning with A* and RRT | Autonomous Navigation, Part 4 MATLAB 17:55 4 years ago 192 483 Далее Скачать
LiDAR Smart Follow Unmanned Ground Vehicle with Obstacle Avoidance (UGV) Foxtech 0:48 3 years ago 6 279 Далее Скачать
Path Planning with Multiple Rapidly-exploring Random Trees for Teams of Robots VeRLab - Laboratory of Computer Vision and Robotics 1:01 13 years ago 1 116 Далее Скачать
Application of RRT Algorithm for Unmanned Ground Vehicle Motion Planning and Obstacle Avoidance Yiqun Dong 1:34 9 years ago 2 593 Далее Скачать
Control Barrier Functions in Dynamic UAV for Kinematic Obstacle Avoidance: A Collision Cone Approach Manan Tayal Research 1:00 11 months ago 205 Далее Скачать
Collision Free Path Planning for Unmanned Aerial Vehicles in Environments with Dynamic Obstacles LoRISwork 2:08 4 years ago 39 Далее Скачать
Motion Planning with Fixed-Wing UAVs Johns Hopkins Applied Physics Laboratory 1:28 4 years ago 5 814 Далее Скачать